ReachOut v.2.0 (Headfixed setup for reaching and treadmill activity)

As a follow-up to the ReachOut project we have developed its full headfixed counterpart, which we ended up never using. But as a bonus here we provide all the details of this side project in a good spirit of open science. We have added a corresponding section to the original GitHub repository (/Headfixed_Setup) and all the contents are described here. Feel free to hit us with any questions that might save you the trial-and-error process we went through.
Project overview
The contents of the project folder in GitHub repository:
- WaterDelivery
- /Water_delivery_3d_models/ (all the models you need for the water delivery system: DIY pump and actuator)
- /Water_delivery_code/ (various Arduino programs corresponding to different protocols)
- /Water_delivery_pictures/ (pictures showing the overview of the system, also Materials Source table)
- /Water_delivery_tests/ (pictures and tests for the system)
- Headplate designs (the designs for the headplates for head fixation, modified after A.Ribic 1 lab)
The following sections lead you through different parts of the setup:
- Hardware,
- Electrical Components,
- Code to run the protocol,
- Device testing and animal training
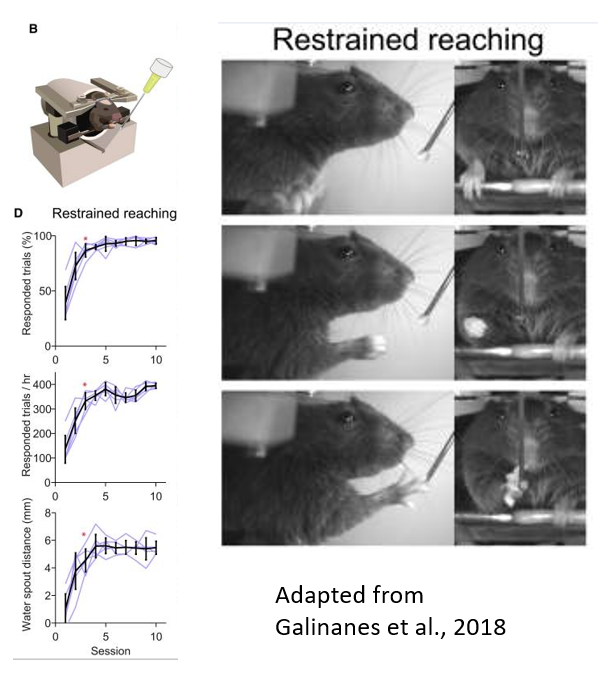
This setup allows you to study cortical circuitry of the reaching movement in more detail using 2-photon microscopy or other methods requiring more stability than you can achieve with freely moving behavior. It is heavily inspired by the one from Galinanes 2018 article 2 and Carlsen 2022 article 3 so for further details we point you to their work. In short, animal is fixed by the head with only the forepaws freely moving, and the water reinforcement is delivered through a blunt syringe needle within reaching distance. The distance is gradually increased during training and the position of the needle changed to shape the proper directional response.
About the project
ReachOut is maintained © 2022-2026 by Daniil Berezhnoi. All the materials are OpenSource and Authors would be happy to help you with any questions on the code.